Capítulo VII

Georradar
Universidad Complutense de Madrid
La técnica de prospección georradar permite averiguar, de forma indirecta, la estructura del subsuelo a partir de la transmisión de impulsos electromagnéticos y de la posterior recepción de las reflexiones generadas por discontinuidades presentes en el subsuelo. En términos físicos, la técnica georradar es sensible a todas aquellas variaciones de conductividad, permitividad eléctrica y permeabilidad magnética que pueden producirse en un medio, sean debidas bien a cambios litológicos o bien por la presencia de estructuras enterradas (Daniels, 2004; Conyers, 2004).
Concretamente, un equipo georradar consta de una unidad de control, almacenamiento y visualización de datos conectada a una antena que emite y recibe la señal electromagnética a medida que ésta se desplaza a lo largo de una dirección preestablecida.
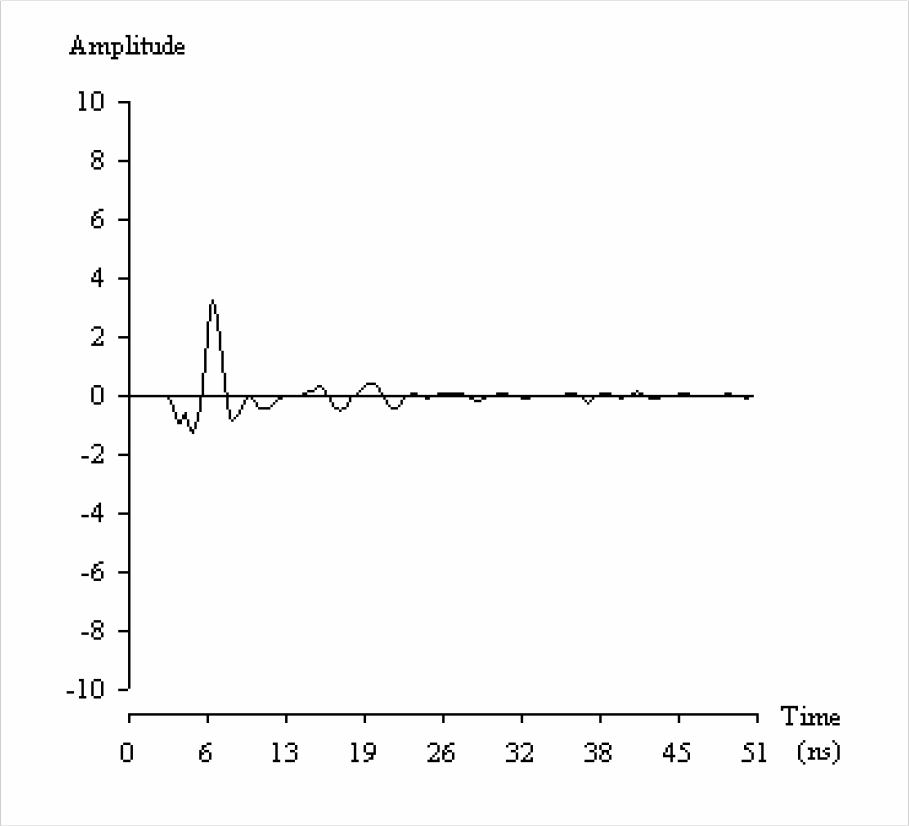
La técnica consiste en la transmisión en el subsuelo de pulsos electromagnéticos de duración breve (1-4 ns) y frecuencia elevada (100-2000MHz) que se propagan en profundidad con una cierta velocidad. Al encontrar una discontinuidad, o una superficie de separación entre dos medios con características electromagnéticas diferentes, parte de la energía de los pulsos trasmitidos vuelve en superficie en la forma de una onda reflejada que la antena capta. Típicamente, para cada pulso transmitido en el suelo, un equipo georradar registra 512 valores de amplitud de onda durante un intervalo de tiempo de algunas decenas de nanosegundos. En los equipos más recientes la resolución horizontal puede alcanzar 1 cm, es decir que el sistema almacena una traza por cada centímetro de recorrido. Un ejemplo de traza de datos georradar está ilustrado en la figura 1. Aquí, el pico de mayor amplitud es debido a la superficie del suelo mientras que los de amplitud más reducida se deben a la presencia de discontinuidades ubicadas a profundidad más elevada. Se entiende que el tiempo de llegada a la superficie de las señales que vuelven a la superficie está directamente relacionado con la velocidad de trasmisión de las ondas electromagnéticas en el terreno investigado, y con la profundidad de la discontinuidad que las ha generado.
Por otro lado, la intensidad de la señal recibida depende del contraste, en términos de parámetros electromagnéticos, entre el objetivo interceptado por el georradar y el terreno circunstante. Debido a que el pulso electromagnético va perdiendo energía a medida que se propaga por el medio investigado, se produce una disminución general de amplitud de la señal a medida que aumenta el tiempo de retraso (fig. 1). Por lo tanto, para poder distinguir la presencia de reflectores profundos, es necesario amplificar oportunamente los datos originales.
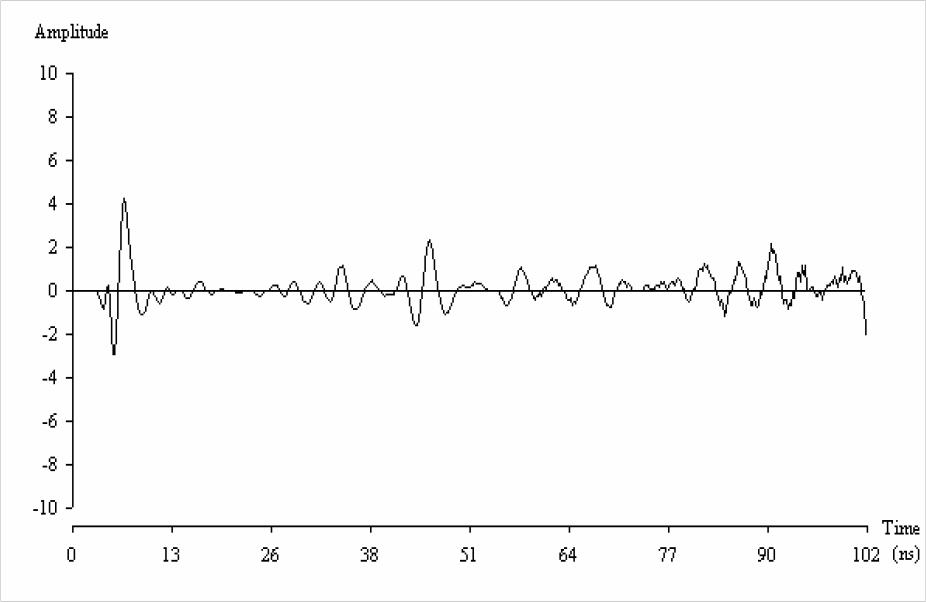
En la figura 2 se ilustra la misma traza de la figura 1 tras la aplicación de una curva de amplificación lineal con respecto al tiempo. Se observa la presencia de nuevos picos de amplitud no apreciables en los datos originales.
En función de factores que en parte dependen de la instrumentación empleada y en parte de las características del suelo investigado, los datos brutos pueden necesitar un tratamiento ulterior cuyo objetivo suele ser la eliminación de ruidos que ocultan la presencia de señales significativas. Típicamente se emplean filtros para la eliminación del fondo y filtros pasa banda para la eliminación de frecuencias non deseadas.
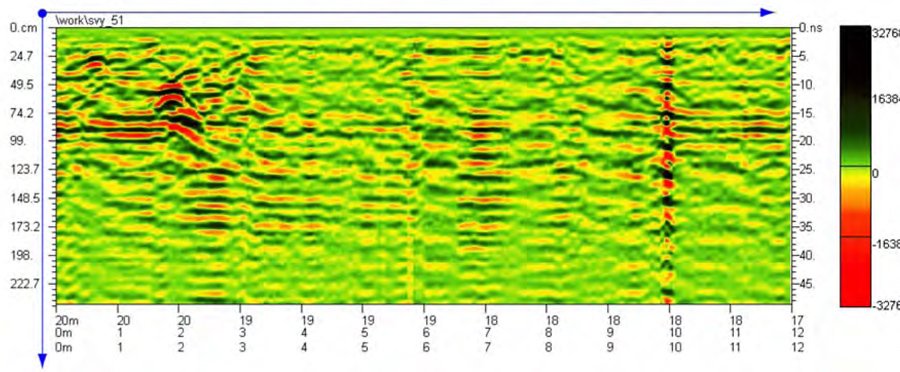
Los datos de amplitud alamcenados están organizados según perfiles denominados radargramas, es decir que el mismo equipo se encarga de yuxtaponer todas las trazas registradas a lo largo de un cierto recorrido. Un ejemplo aparece en la figura 3, donde el eje horizontal corresponde con la dirección de movimiento del georradar (12m) y el vertical con la ventana temporal durante la cual se el equipo recoge las señales que rebotan hacia la superfice. El eje de tiempo se convierte en eje de profudidad tras conocer la velocidad de propagación de las ondas electromagnéticas en el medio investigado. Por lo dicho un radargrama puede considerarse como una pseudo-sección de suelo.
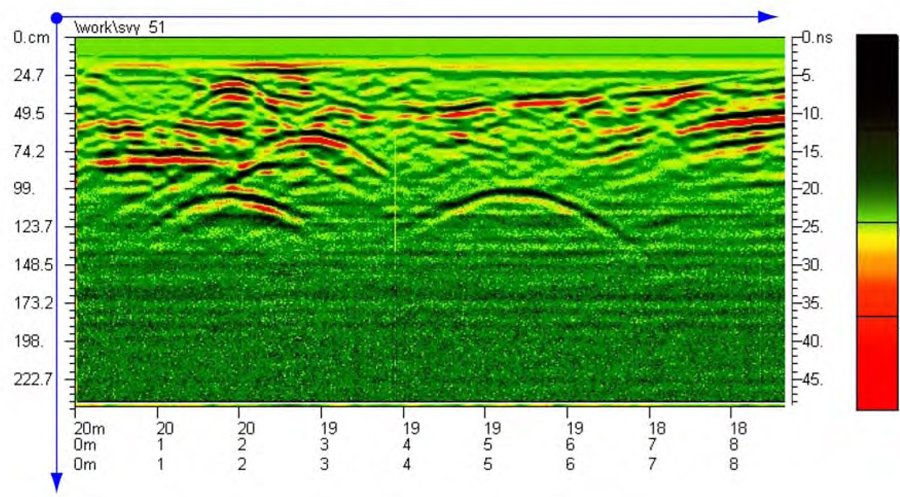
Las antenas empleadas por los georradares son de tipo direccional, es decir emiten según una dirección preferencial siendo el haz electromagnético asimilable a un tronco de cono más o menos cerrado que se abre en profundidad. Como consecuencia, las radiaciones pueden interceptar objetivos que no están en la vertical de la antena. Los reflejos generados por ellos llegarán entonces al aparato receptor con un retraso mayor, apareciendo más profundos de lo que realmente son. En este sentido, el efecto más clásico es que un objeto cilíndrico orientado perpendicularmente al perfil, se presenta en el radargrama con una sección hiperbólica donde los ramos ascendiente y descendiente son registrados antes y después del paso de la antena sobre la vertical del objetivo (fig. 4).
El conocimiento de la velocidad de propagación de las ondas electromagnéticas en el medio investigado es esencial para la conversión de los tiempos de retraso en profundidades. En lo referente a las antenas de los georradares, las que se usan actualmente suelen ser de tipo mono-estático (misma posición para loa dispositivos de transmisión y recepción) con apantallamiento. Éste es esencial tanto para la recepción de señales “limpias” así como para la seguridad de los operadores en cuanto a emisiones electromagnéticas.
La velocidad puede determinarse empíricamente, es decir interceptando un objetivo ubicado a profundidad conocida, mediante técnicas de análisis electromagnétcio de la señal (hyperbola fitting) o estimarse en función de las características litológicas del subsuelo (Tabla I).
Tabla1. Valores estimativos de constante dieléctrica y atenuación para diferentes materiales y litologías y materiales a 100 MHZ (Daniel, D. J., 1996).
Tanto la profundidad así como la resolución de una prospección con georradar dependen de la frecuencia de trabajo, es decir de las antenas empleadas, y de las características litológicas del terreno investigato. En general, al aumentar la frecuencia de trabajo crece la resolución y disminuye la profundidad. Para prospecciones hasta 2-2.5m de profundidad suelen emplearse antenas con frecuencia de 400-500 MHz. Frecuencias de 200-250 MHz permiten alcanzar una profundidad de 4-5 m en condiciones litológicas favorables es decir trabajando sobre sedimentos secos de granulometría gruesa como arenas o gravas. Las de frecuencia menor (≤100 MHz) tienen utilidad en aplicaciones muy específicas que tengan como objetivo la localización de estructuras extensas y profundas (del orden de 6-7 metros). Por último, existen además antenas de frecuencia muy elevada, 1000-2000 MHz, que se emplean exclusivamente en el marco de estudios de ingeniería civil y de patrimonio artístico, donde los objetivos son profundidades del orden del decímetro o del centímetro (localización de armaduras, caracterización de capas de asfaltos, de pinturas y de estucos).
Los parámetros que hay que preestablecer en la mayoría de los georradares son la constante dieléctrica relativa (ε) y la atenuación. El primero permite calcular la profundidad de una discontinuidad y está definido por la expresión c2/Vr2, donde c es la velocidad de la luz en el vacío (3x108 m/s) y Vr es la velocidad de las ondas electromagnéticas en el medio considerado. El segundo se expresa en dB/m y representa la reducción de intensidad de la señal transmitida en el subsuelo por unidad de espacio. La atenuación es una función compleja de la conductibilidad eléctrica que, en general, controla la profundidad máxima de penetración que puede alcanzar el georradar en un cierto material. Valores elevados de atenuación se encuentran en sedimentos de granulometría muy fina, como limos y arcillas, en materiales cristalinos solubles, metales, soluciones salinas, etc. En cambio, valores bajos son característicos de rocas cristalinas, gravas, arenas y formaciones detríticas.
Metodología de trabajo en ámbito arqueológico
El uso del georradar en el ámbito arqueológico y, más en general, en el marco de estudios de conservación y de protección del patrimonio histórico-artístico ha ido creciendo en la última década gracias al desarrollo de nuevas técnicas de procesado y representación de los datos.
Clásicamente la prospección de un área con georradar suponía la adquisición de una serie de perfiles paralelos y equidistantes, o distribuidos según una malla de adquisición regular, donde la distancia entre perfiles es función de las dimensiones de las estructuras que se quieran detectar. Contextualmente, el análisis de los resultados se basaba en la evaluación de las anomalías contenidas en los radargramas y en la correspondencia de las anomalías en radargramas cercanos.
Con esta aproximación, el producto de una prospección con georradar proporcionado a los arqueólogos solía estar constituido por una planimetría donde se representa la posición de los perfiles adquiridos junto con una serie de símbolos y texturas que corresponderían a las diferentes anomalía detectadas (huevos, ahondamientos, superficies, muros, ,etc.). Según ha sido ampliamente demostrado, esta forma de trabajar tiene fuerte limitaciones debidas a varias a razones. Principalmente por la complejidad de detectar e interpretar las anomalías basándose únicamente en su aspecto en 2 dimensiones, y por la dificultad de clasificar de forma coherente todas las anomalías registradas sobre un área.
En la última década, sobretodo en ámbito arqueológico, ha ido consolidándose el uso de una nueva técnica de procesado y representación de datos denominada técnica de los cortes de tiempo horizontales, también conocida como Time slices imaging techinique (Goodman et al., 1995). Dicha técnica trata conjuntamente la serie de radargramas adquiridos sobre un área y tiene como objetivo la elaboración de mapas horizontales de la amplitud de las reflexiones registradas. En palabras sencillas, se trata de "cortar" los radargramas a varias profundidades y de interpolar horizontalmente los datos de los diferentes radargramas que están referidos a la misma profundidad. La interpolación horizontal de datos separados por una cierta distancia se realiza mediante algoritmos matemáticos, tipo el krigging o los vecinos próximos, que permiten “rellenar” los “huecos” entre radargramas con datos artificiales.
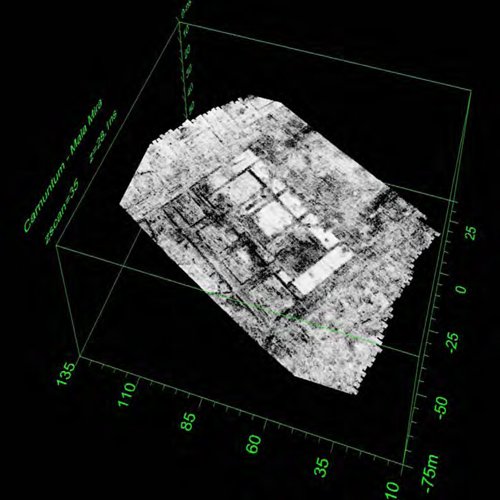
Según ha ido afirmándose el uso de esta técnica, ha sido puesto de manifiesto que la fiabilidad o la resolución de las prospecciones con georradar depende en larga medida de la frecuencia espacial del muestreo de datos, donde cuanto más reducida es la distancia entre perfiles consecutivos tanto más elevada es la resolución de las imágenes elaboradas, y de la precisión en el posicionamiento de los datos. Un ejemplo muy exhaustivo de las potencialidades del método aparece en figura 5 (Goodman et al., 2011) donde se ilustran los resultados de una prospección con espaciado entre perfiles de 12cm y cuyo posicionamiento de los datos sobre el terreno fue realizado mediante un sistema GPS de tipo RTK. La imagen obtenida muestra de forma absolutamente realística la planta de un edificio enterrado junto con una gran variedad de detalles constructivos.
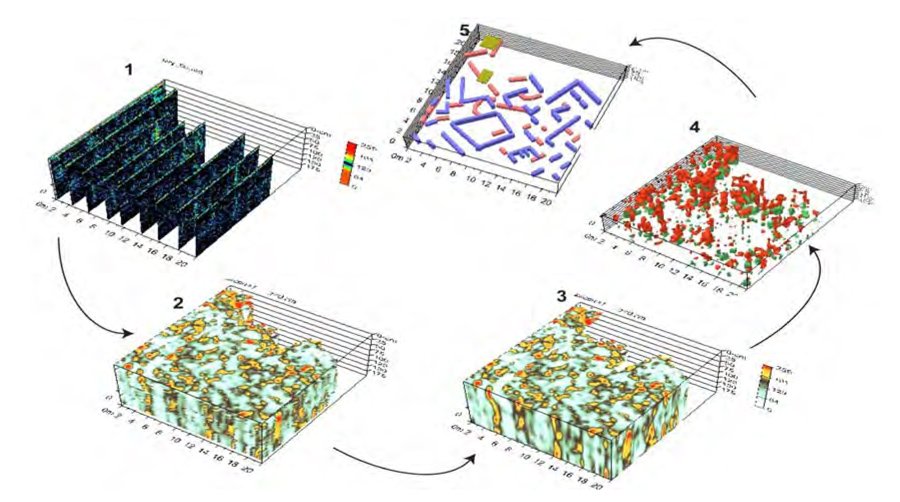
Trabajando con esta técnica se suelen elaborar alrededor de 15-20 mapas de amplitud solapadas al 50% y distribuidas a lo largo del intervalo de profundidad que abarca la prospección. Por interpolación vertical de los mapas de amplitud es luego posible obtener modelos 3D y animaciones, que permiten estudiar la evolución de las anomalías a medida que aumenta la profundidad y apreciar cambios sutiles en la configuración dieléctrica del subsuelo, difíciles o imposibles de percibir en los radargramas. Un esquema ejemplificado de este flujo de trabajo está representado en la figura 6.
Cabe destacar que trabajando con equipos tradicionales de tipo monocanal, la adopción de espaciados tan reducidos, del orden de 15-20cm, es de hecho poco viable ya que supone tiempos de adquisición excesivamente largos. En este sentido, es suficiente pensar que prospección de un área de 20X20m con un espaciado de 20 cm, supone la adquisición de más de 2km de perfiles. En la práctica, trabajando con equipos monocanales, se suelen por tanto establecer distancias de 40-50cm.
Estas últimas consideraciones también explican que los instrumentos más novedosos actualmente en comercio estén concebidos para adquirir simultáneamente varios perfiles paralelos en posiciones muy próximas, operan mediante tracción mecánica, es decir acoplados a un vehículo, y permiten trabajar en paralelo con sistemas GPS.
Galería de imágenes de la sección
continuar >>>Detección y registro de estructuras arqueológicas
Referencias bibliográficas
- Conyers, Lawrence B. Ground-Penetrating Radar for Archaelogy. California, 2004. ISBN: 9780759107731
- Daniels, David J. Ground Penetrating Radar. The Institution of Electrical Engineers. Londres, 2004. ISBN: 9780863413605
- Daniels, David J. Subsurface-Penetrating Radar. The Institution of Electrical Engineers. Londres, 1996.
- Goodman, Dean, Alexandre Novo, Gianfranco Morelli, Salvatore Piro, Doria Kutrubes y Henrique Lorenzo. “Advances in GPR Imaging with Multi‐Channel Radar Systems from Engineering to Archaeology.” Symposium on the Application of Geophysics to Engineering and Environmental Problems (SAGEEP), (2011): 416–422. DOI: 10.4133/1.3614128
- Goodman, Dean, Nishimura Yasushi y Rogers J. Daniel. “GPR (Ground Penetrating Radar) Time Slices in Archaeological Prospection.” Archaeological Prospections II (1995): 85–89. DOI: 10.1002/1099-0763(199506)2:2<85::AID-ARP6140020204>3.0.CO;2-#